MPhys Integration
OpenAeroStruct provides an interface for coupling its internal solvers with MPhys. MPhys is a package that standardizes multiphysics problems in OpenMDAO across multiple fidelity levels. MPhys eases the problem set up, provides straightforward extension to new disciplines, and has a library of OpenMDAO groups for multidisciplinary problems addressed by its standard. The MPhys library currently supports from the following libraries: ADFlow, DAFoam, FunToFEM, pyCycle, pyGeo, and TACS.
Note
Currently, only OpenAeroStruct’s aerodynamic solver is supported in the MPhys wrapper. The structural solver has yet to be added.
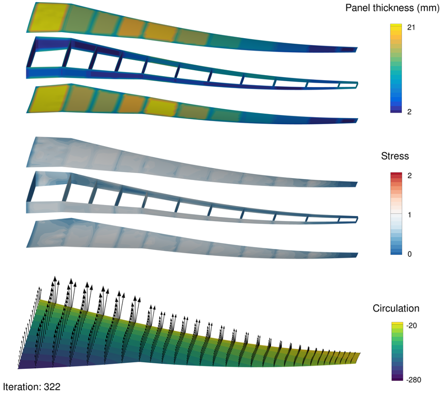
This potentially gives OpenAeroStruct the capability to be coupled with any of the above mentioned libraries. One could, for example, couple a 3D high-fidelity wingbox structural model in TACS with a VLM aerodynamic wing model in OpenAerostruct using FunToFEM’s load/displacement coupling scheme. The following shows an example of a result from a from such an analysis.
The script below shows an example of how to setup and run the MPhys interface.
The example couples pyGeo’s OpenVSP parameterization with OpenAeroStruct’s aerodynamic solver to perform an aerodynamic optimization.
The interface will also write out aerodynamic solutions in a .plt file format that can open and viewed in TecPlot.
"""
Use Mphys/OpenVSP interface to perform inviscid drag minimization of
an initially rectangular wing with respect to the chord distribution,
subject to a lift and reference area constraint. Similar to the twist optimization,
the expected result from lifting line theory should produce an elliptical lift distrbution.
Check output directory for Tecplot solution files.
"""
import os
import openmdao.api as om
import numpy as np
from mphys.core import Multipoint, MPhysVariables
from mphys.scenarios import ScenarioAerodynamic
from pygeo.mphys import OM_DVGEOCOMP
from openaerostruct.geometry.utils import generate_vsp_surfaces
from openaerostruct.mphys import AeroBuilder
class Top(Multipoint):
def setup(self):
# VSP model
vsp_file = os.path.join(os.path.dirname(__file__), "rect_wing.vsp3")
# Generate half-body mesh of rectangular wing
surfaces = generate_vsp_surfaces(vsp_file, symmetry=True, include=["WingGeom"])
surf_options = {
"type": "aero",
"S_ref_type": "wetted", # how we compute the wing area,
# can be 'wetted' or 'projected'
"twist_cp": np.zeros(3), # Define twist using 3 B-spline cp's
"ref_axis_pos": 0.25, # Define the reference axis position. 0 is the leading edge, 1 is the trailing edge.
# Aerodynamic performance of the lifting surface at
# an angle of attack of 0 (alpha=0).
# These CL0 and CD0 values are added to the CL and CD
# obtained from aerodynamic analysis of the surface to get
# the total CL and CD.
# These CL0 and CD0 values do not vary wrt alpha.
"CL0": 0.0, # CL of the surface at alpha=0
"CD0": 0.0, # CD of the surface at alpha=0
# Airfoil properties for viscous drag calculation
"k_lam": 0.05, # percentage of chord with laminar
# flow, used for viscous drag
"t_over_c": 0.12, # thickness over chord ratio (NACA0015)
"c_max_t": 0.303, # chordwise location of maximum (NACA0015)
# thickness
"with_viscous": False, # if true, compute viscous drag,
"with_wave": False,
} # end of surface dictionary
# Update each surface with default options
for surface in surfaces:
surface.update(surf_options)
mach = 0.0
aoa = 5.0
beta = 0.0
rho = 0.38
vel = 248.136
re = 1e6
dvs = self.add_subsystem("dvs", om.IndepVarComp(), promotes=["*"])
dvs.add_output(MPhysVariables.Aerodynamics.FlowConditions.ANGLE_OF_ATTACK, val=aoa, units="deg")
dvs.add_output(MPhysVariables.Aerodynamics.FlowConditions.YAW_ANGLE, val=beta, units="deg")
dvs.add_output("rho", val=rho, units="kg/m**3")
dvs.add_output(MPhysVariables.Aerodynamics.FlowConditions.MACH_NUMBER, mach)
dvs.add_output("v", vel, units="m/s")
dvs.add_output(MPhysVariables.Aerodynamics.FlowConditions.REYNOLDS_NUMBER, re, units="1/m")
dvs.add_output("cg", val=np.zeros((3)), units="m")
# Create mphys builder for aero solver
aero_builder = AeroBuilder(surfaces)
aero_builder.initialize(self.comm)
# Create mesh component and connect with solver
self.add_subsystem("mesh", aero_builder.get_mesh_coordinate_subsystem())
# add the geometry component, we dont need a builder because we do it here.
self.add_subsystem("geometry", OM_DVGEOCOMP(file=vsp_file, type="vsp"))
# add pointset
self.geometry.nom_add_discipline_coords("aero")
self.mphys_add_scenario("cruise", ScenarioAerodynamic(aero_builder=aero_builder))
self.connect(
f"mesh.{MPhysVariables.Aerodynamics.Surface.COORDINATES}",
f"geometry.{MPhysVariables.Aerodynamics.Geometry.COORDINATES_INPUT}",
)
self.connect(
f"geometry.{MPhysVariables.Aerodynamics.Geometry.COORDINATES_OUTPUT}",
f"cruise.{MPhysVariables.Aerodynamics.Surface.COORDINATES}",
)
# Connect dv ivc's to solver
for dv in [
MPhysVariables.Aerodynamics.FlowConditions.ANGLE_OF_ATTACK,
MPhysVariables.Aerodynamics.FlowConditions.YAW_ANGLE,
MPhysVariables.Aerodynamics.FlowConditions.MACH_NUMBER,
MPhysVariables.Aerodynamics.FlowConditions.REYNOLDS_NUMBER,
"rho",
"v",
"cg",
]:
self.connect(dv, f"cruise.{dv}")
def configure(self):
# create geometric DV setup
self.geometry.nom_addVSPVariable("WingGeom", "XSec_1", "Root_Chord", scaledStep=False)
self.geometry.nom_addVSPVariable("WingGeom", "XSec_2", "Root_Chord", scaledStep=False)
self.geometry.nom_addVSPVariable("WingGeom", "XSec_3", "Root_Chord", scaledStep=False)
self.geometry.nom_addVSPVariable("WingGeom", "XSec_4", "Root_Chord", scaledStep=False)
self.geometry.nom_addVSPVariable("WingGeom", "XSec_4", "Tip_Chord", scaledStep=False)
prob = om.Problem()
prob.model = Top()
# Set optimizer as model driver
prob.driver = om.ScipyOptimizeDriver()
prob.driver.options["debug_print"] = ["nl_cons", "objs", "desvars"]
# Setup problem and add design variables, constraint, and objective
prob.model.add_design_var("geometry.WingGeom:XSec_1:Root_Chord", lower=1e-3, upper=5.0)
prob.model.add_design_var("geometry.WingGeom:XSec_2:Root_Chord", lower=1e-3, upper=5.0)
prob.model.add_design_var("geometry.WingGeom:XSec_3:Root_Chord", lower=1e-3, upper=5.0)
prob.model.add_design_var("geometry.WingGeom:XSec_4:Root_Chord", lower=1e-3, upper=5.0)
prob.model.add_design_var("geometry.WingGeom:XSec_4:Tip_Chord", lower=1e-3, upper=5.0)
prob.model.add_design_var("aoa", lower=-10.0, upper=10.0)
prob.model.add_constraint("cruise.WingGeom.CL", equals=0.5)
prob.model.add_constraint("cruise.WingGeom.S_ref", equals=10.0)
prob.model.add_objective("cruise.WingGeom.CD", scaler=1e4)
prob.setup()
# Create a n^2 diagram for user to view model connections
# om.n2(prob)
prob.run_model()
prob.run_driver()
# Write optimized geometry to vsp file
prob.model.geometry.DVGeo.writeVSPFile("opt_chord.vsp3")
print("CL", prob["cruise.WingGeom.CL"][0])
print("CD", prob["cruise.WingGeom.CD"][0])